Abstract
In the context of an international collaboration, a sub-millimeter positioning system is under development, the “Hive Tracker”. Both the electronics and the embedded software being functional, the work presented here focuses on the use of the produced data as well as on optimization experiments. The tracker embeds two imperfect sensor types (optical and inertial), the purpose of this internship was to merge the best of each data type to improve dynamism, accuracy and stability of the system. This work took place in the following way, a first phase of study allowed getting used to the project tools and the realization of a simulator. The following phase was the implementation of a simulator, then a phase of design of a mechanical structure with constrained geometry. Finally, a characterization phase of the implemented tools was carried out. After this internship, the tracker has the theoretical tools set up and functional for a centimetric accuracy. The Kalman filter slightly attenuate noise of measurements. We can eventually hope to use only the data of the accelerometer in case of occlusion of photodiodes. The noise of the measurements being greater than expected, the rest of the team involved will be able to concentrate on the implementation of more specific tools.
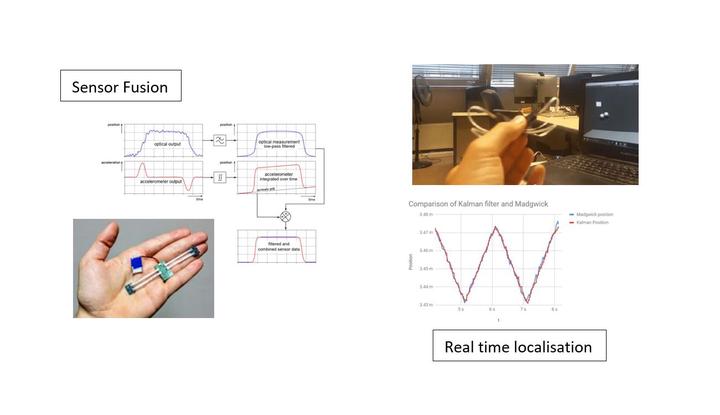
This Master project was about the miniaturization of the Vive Tracker developpd by HTC. It allows sub-millimetric 3d positioning at scale, and embeds a 9DoF IMU with sensor fusion. The repository shows several developments and documented test bricks.
![]()
During this project, I had first simulate the Hive Tracker on a game engine.

I have then implemented the mathematical principle of the HTC Vive localisation. We wanted to publish it in open source, we used Blender for 3D virtual representation.

Julien Mellet
Robotics and Aerospace Engineer
My research interests include distributed robotics, mobile computing and programmable matter.