Julien Mellet
Robotics and Aerospace Engineer
About
This portfolio presents different projects on which I worked during my Master of Science. My various works was adviced by Prof. Sinan Halyio, Cédric Honnet, and Prof. Wang Jingyu
Research Vision
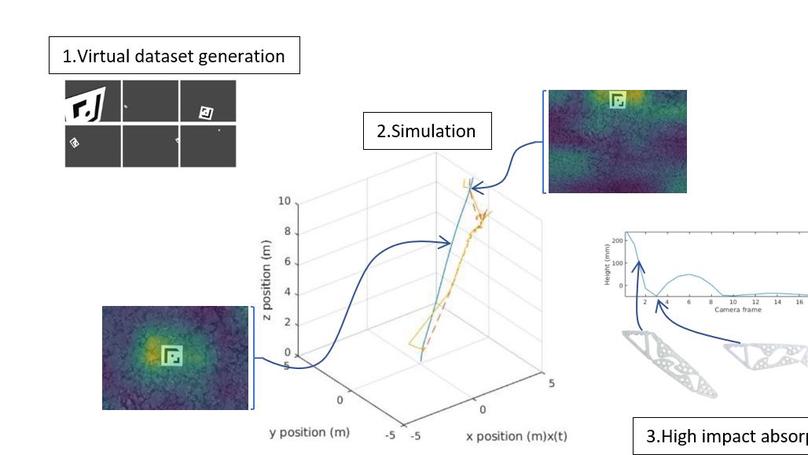
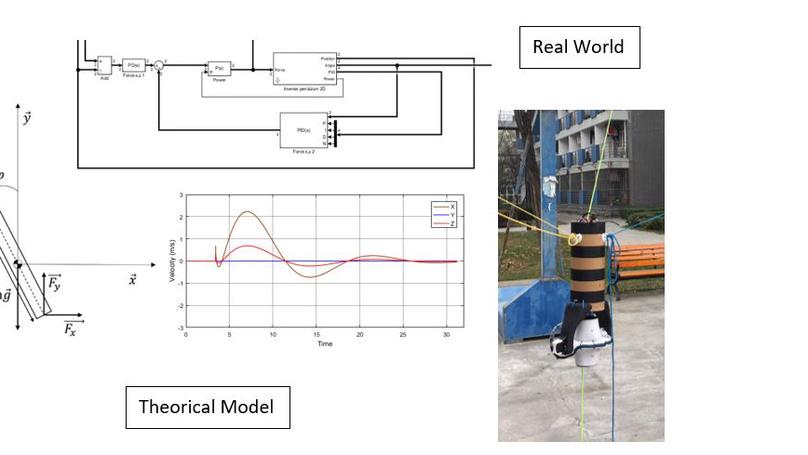
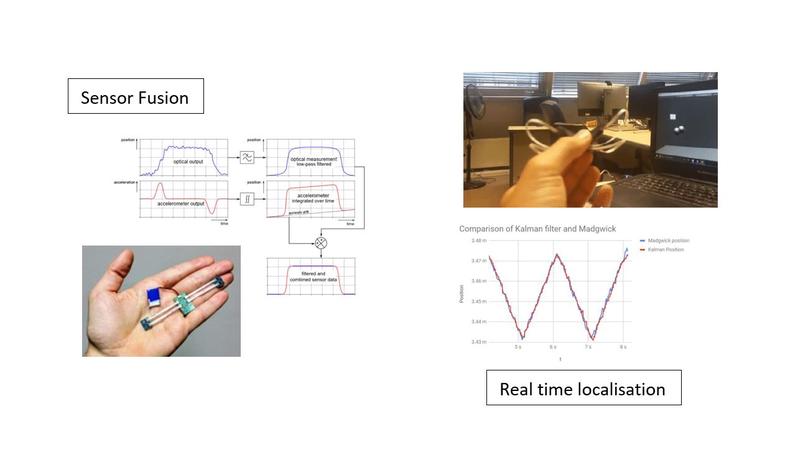
In my MSc research I aimed to perform agressive drone landing using standard platforms. Quality of control depends on the precision of the estimation of the system state, which itself depends on the precision allowed by the sensors.
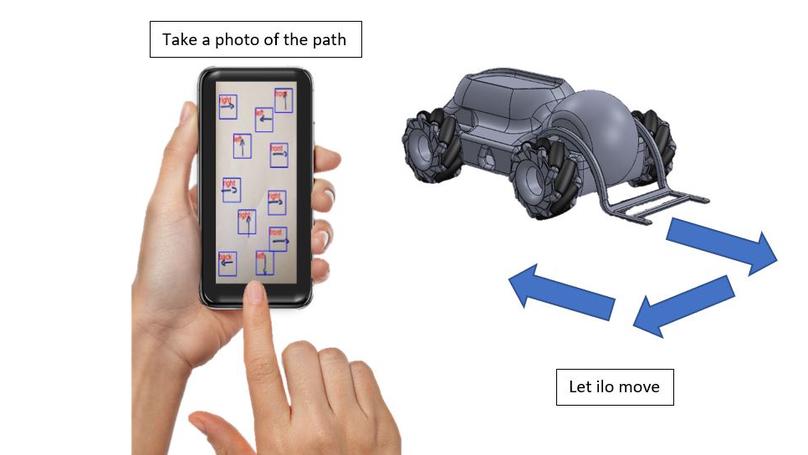
Now I would like to accelerate the era of autonomy defined by highly manoeuvrable robots, extremely reliable and minimally invasive for the environment. To achieve this, my goal is to make a breakthrough in reliability by teaching robots with increased senses for safety, ensured performance and super-human abilities.